ZED-2 AI Stereo Camera
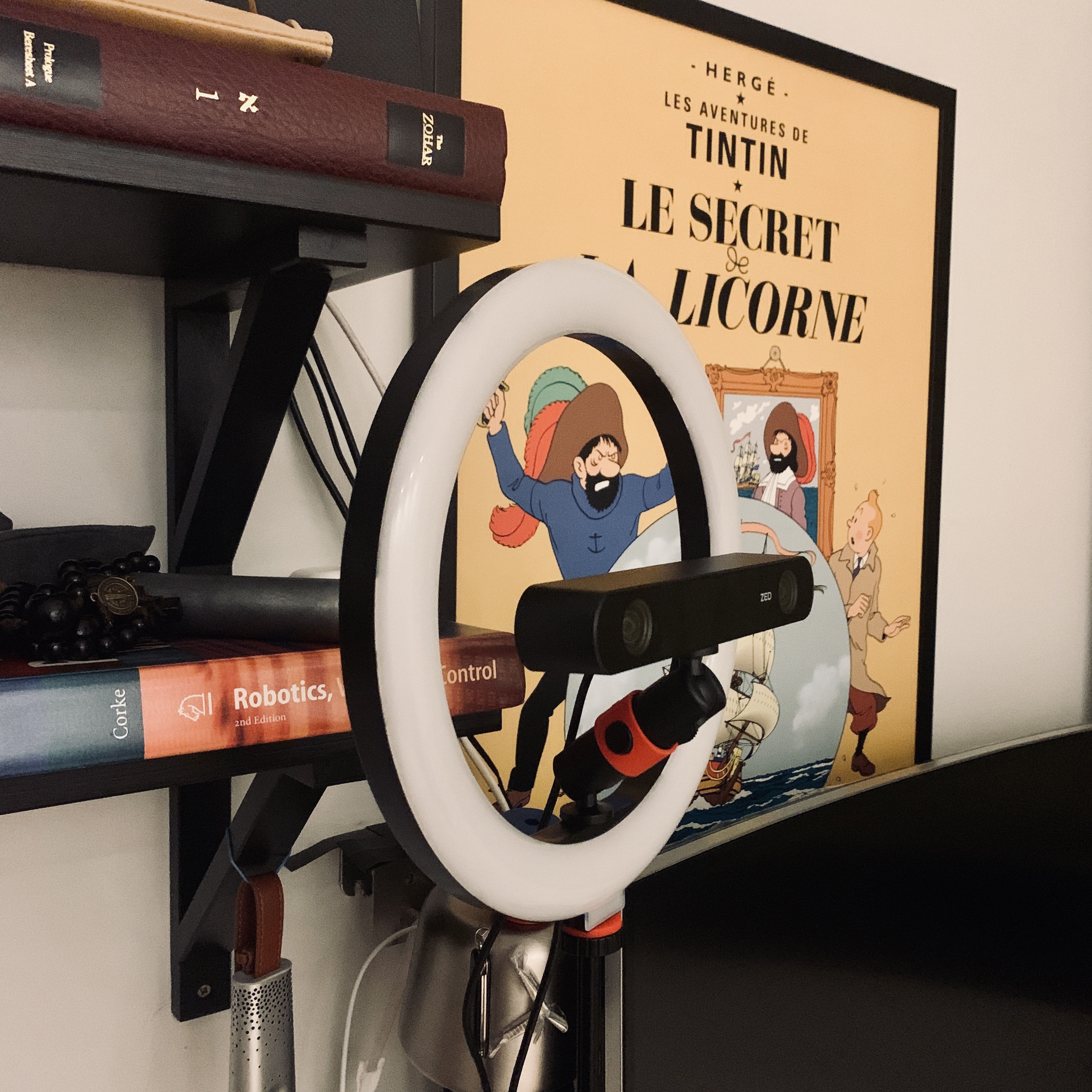
In a few words... this is a great camera and ecosystem (you need) if you start the prototyping phase of the product in the early stage.
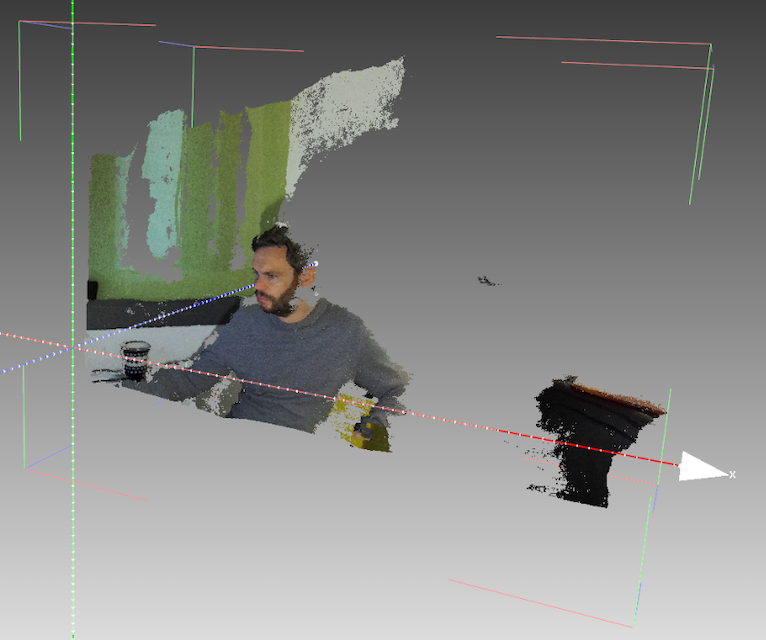
Stereolabs delivers a solid CUDA enabled SDK with plenty of examples, wrappers, and integrations. It's also well optimized for the Jetson family.
Unfortunately, I have experienced some issues with the compilation of OpenPose or OpenCV wrappers & examples. In most of the cases, it's due to bugs in 3rd party dependencies (you might need some workarounds and hacks, too).
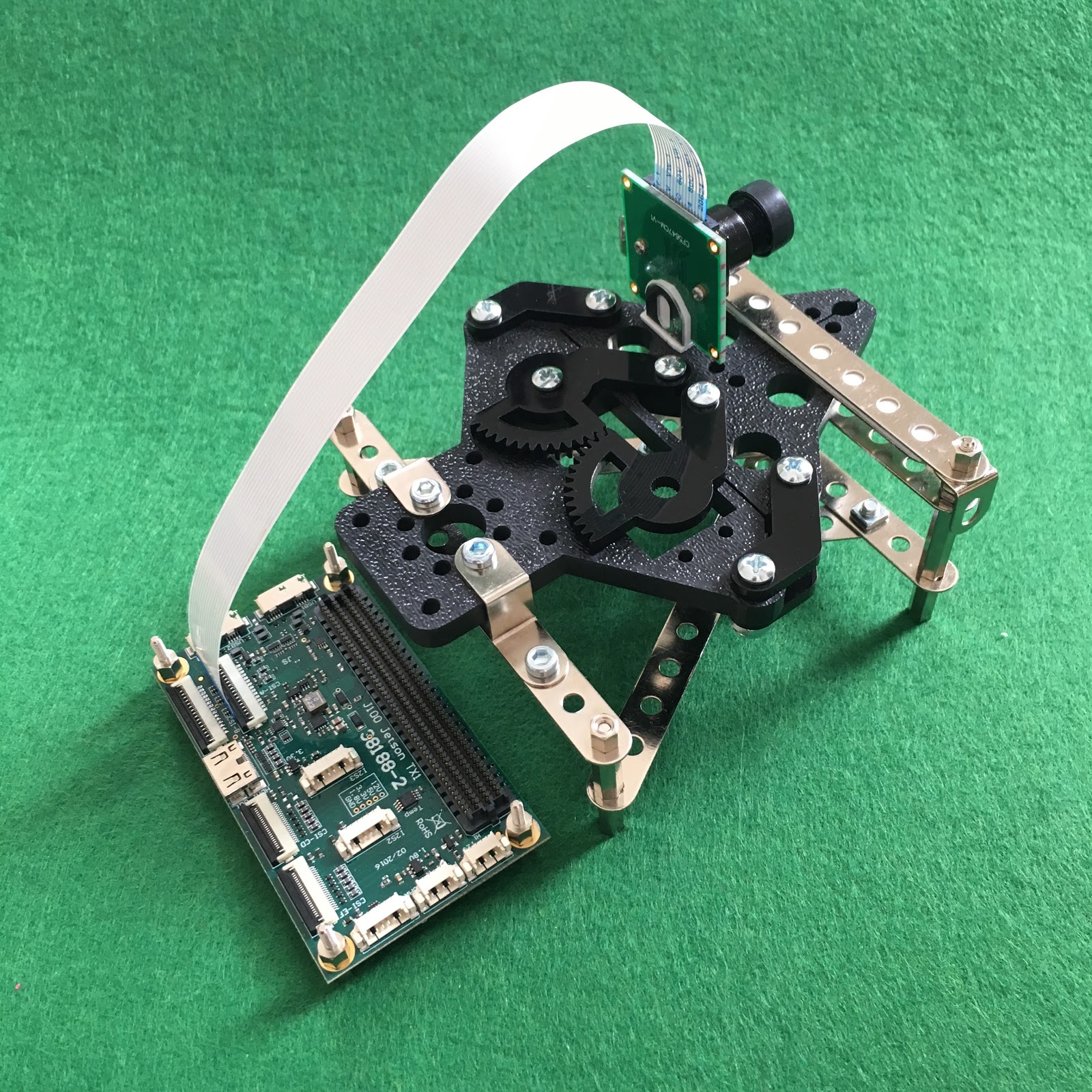
In my case, the camera is used with Jetson Nano 4GB, Jetson TX-1, and Jetson Xavier AGX. It works perfectly well on TX-1 and Xavier, while Jetson Nano can experience performance problems in higher resolutions (due to limited CUDA throughput and slow 4GB memory).








Comments